|
|
2019年09月22日。 PTFEボーデンチューブを透明なものに変更してから、エクストルーダーのギアが空転してフィラメントが送られなくなる症状に悩まされていました。 結局は白いチューブを透明に交換してからなので、PTFEチューブ(テフロンチューブ)の粗度(或いは粘性?)に微妙な違いがあって、これがフィラメントの送りに影響が出ていたと思われるのですが、フィラメントの状態が可視化できる透明チューブはなかなか捨てがたい.... プリンタに付属のプラスチック製の黄色いエクストルーダーは、作りがちょっとチープで、これも空転の原因の一つでは? さらにデフォルトの取り付け位置がプリンタの背面側のため、自作の木製プリンタケースに収めるようにしてから手が届かない! 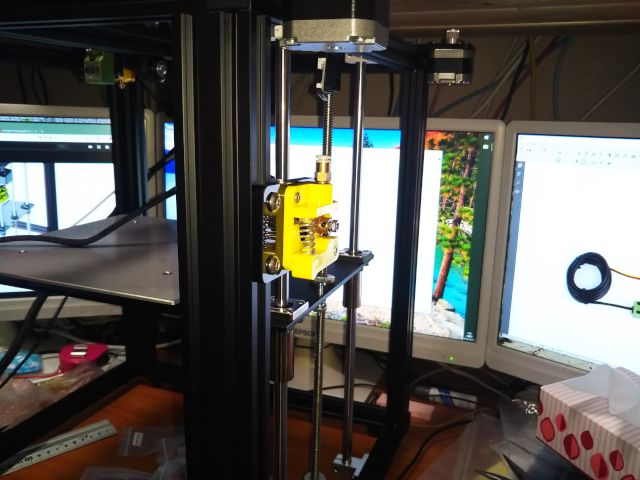 しかも、フィラメントのリリースレバーがかなり堅いため輪をかけて使い勝手が悪い状況にあります。 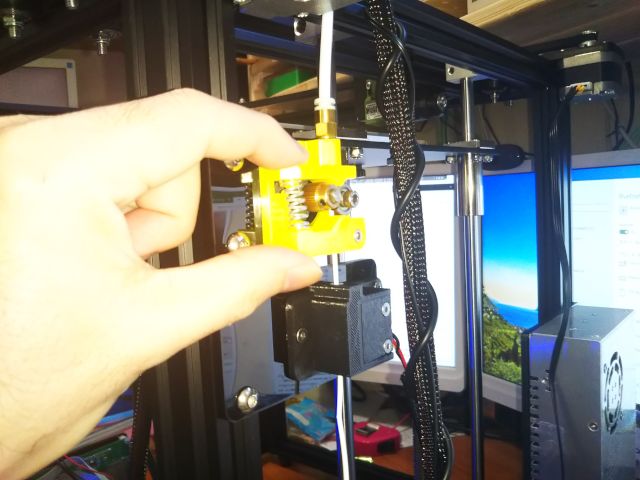 で、AliExpressで別の物を購入して、交換する事に。  本体がアルミダイカスト製で380円ほど。 そして今回は向きをRIGHTからLEFTに変更。   向きが違うものに変えた理由は下の写真を見てもらえば分かると思います。  背面から右側面に移動させたことと、LEFTに変更したことでリリースレバーが手前側になって格段に操作しやすくなりました。 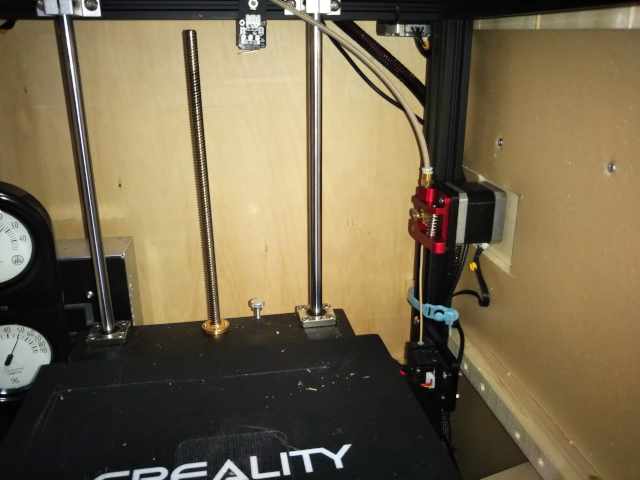 ただ、このままではフィラメントの送りと戻りが逆動作になってしまいます。  そこで、エクストルーダーモーターのケーブルをひっくり返してやる必要があります。 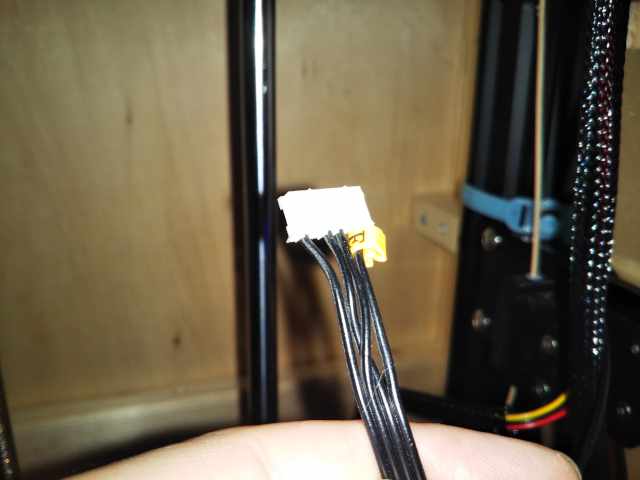 コネクタ部は爪がついていて差し込む方向が決まっているので、コードを抜いて左右反対に繋ぎ直す必要があります。  これでOK!...と思いきや、本体がアルミ製になり、精度が上がった筈でしたが、やはりフィラメントの送り不良が発生します。 考えてみると、このエクストルーダーは本体が金属製に変わっただけで、元々金属製のギヤ部分が、2個の内の片方がただの滑車タイプのガイドになっている、プリンタ付属のエクストルーダーと同じです。  そこで、こんな物を見つけて早速GETしました。 デュアルギアタイプで、2個のギアが噛み合うため空転が起こりにくい構造です。  1,500円したけど、これでだめならPTFEチューブを白チューブに戻すつもりで思い切って購入してみました。  結果的に、デュアルギアタイプへの交換は正解でした。 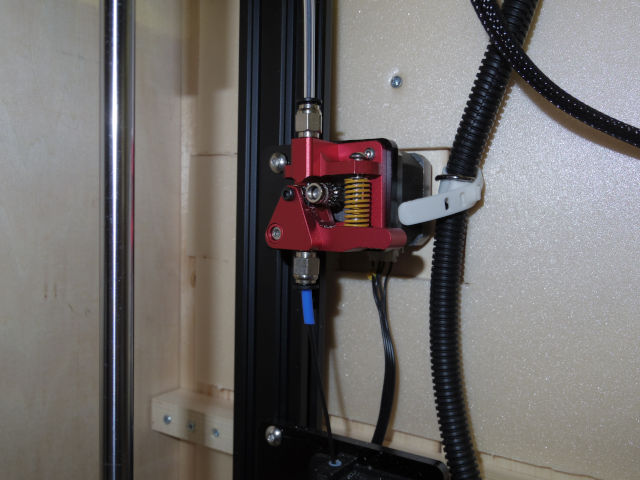 フィラメントの供給が安定しました。  2020年03月08日。 Ender-4の購入以来、僕を悩ませていたオートレベリングセンサー。 撤去を決意しました。 3Dプリンタと同時に購入したオートレベリングセンサー。 検出厚が薄すぎてガラスベッドやマグネットベッドを使うと検出できなくなるという問題を抱えていました。 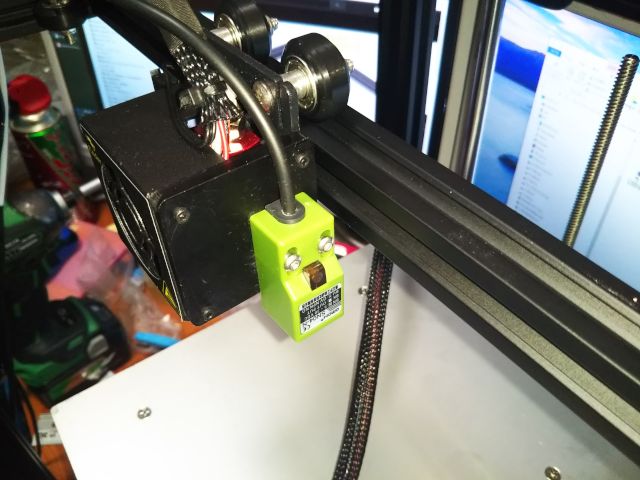 別のセンサーに交換してみたものの、今度はベッドを加温すると、検出厚が変化してしまうという困ったちゃんでした。 個体差かと思って同じ物を買い直しましたが、問題は解決せず。  これもダメでした(上と同様に検出厚が温度に影響される) 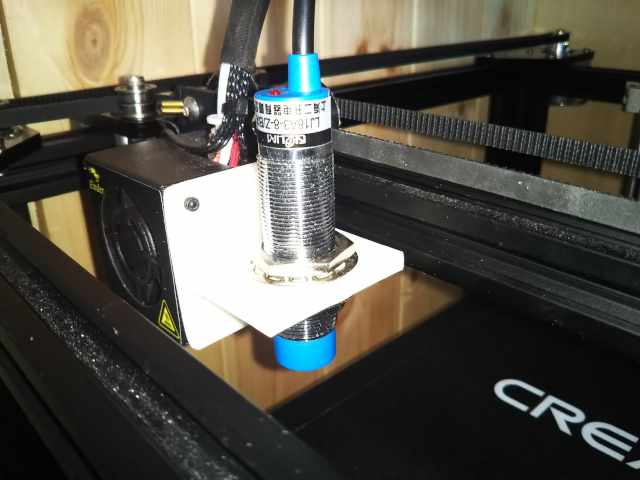 非接触センサーがだめなのかと、接触型センサーを取り付けようと、AliExpressにて、アダプタ含めて約2千円投資しましたが...  下の写真、一緒に購入したBL Touch互換の接触型センサー用のアダプタなんですが、対応機種が「ENDER-3, ENDER-5, CR-10....」と、あっさりENDER-4がスルーされている哀しさ...(ToT) まあ、承知の上で敢えて購入したのですが、奇跡は起こらず、見事撃沈しました。(笑) 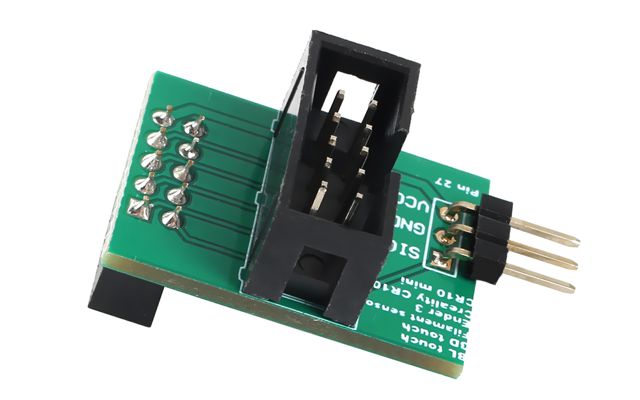 自分が購入したおよそ一ヶ月後にENDER-4は販売を終了し、入れ替わりにENDER5が発売されているので、ENDER-4の不遇ぶりを改めて恨めしく思いました ┐(´-`)┌ で、決断しました。 オートレベリングセンサー、撤去しました。 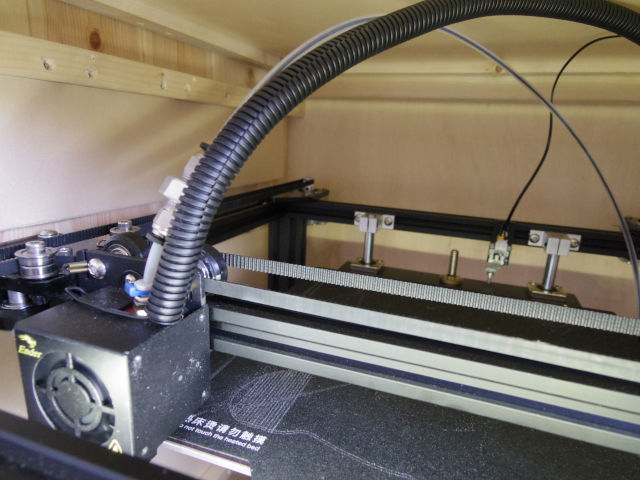 そしてZ軸のリミットスイッチを復活させました。 ファームウェアもCuraを使用して手動レベリング仕様に戻しました。 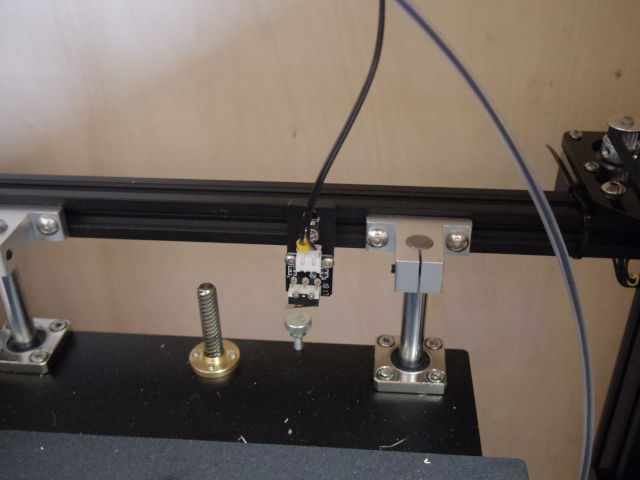 そもそも3Dプリンターのオートレベリング機能って、未だによく理解できていません。 自分は「ベッド面が傾斜していても、4隅の高さを測ってこれを仮想的に水平面としてフィラメントを積層していくよう補正してくれる機能...」みたいなイメージだったのですが、どうも違うみたい.... それならば、一度、水平器やスマホアプリを使ってベッド面とガントリーの水平を取り、AUTO HOME時のベッドとノズルの距離を隙間ゲージで合わせておけば、印刷の度にいちいち調整を実行する必要はないんじゃないかと。 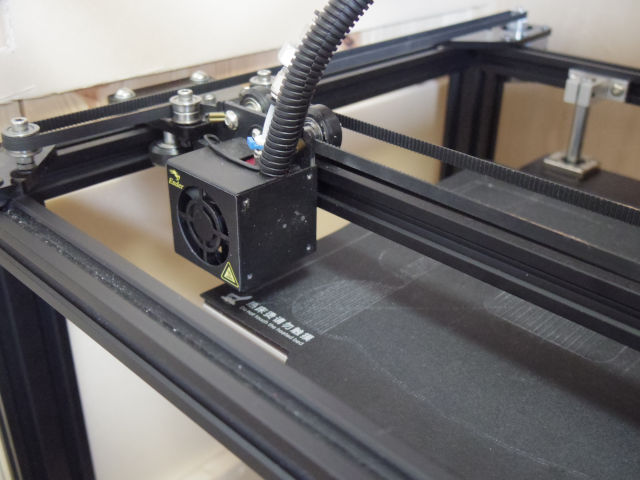 自分にはこの方法の方がしっくりくる気がしています。  写真ではまだ非接触センサー本体をノズルヘッドから外していませんが、これは既にZ軸を手動レベリングに変更してから出力した、電気カンナの集塵アダプタです。 
|